 Part of the Endoscopic Vision Challenge¶
Part of the Endoscopic Vision Challenge¶



About¶
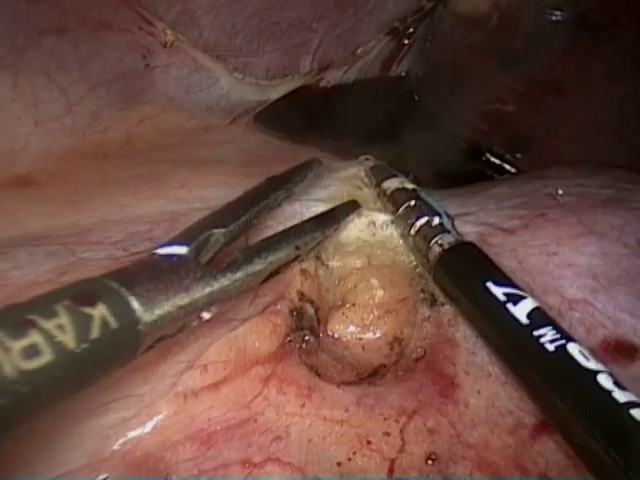
Intraoperative detection and tracking of laparoscopic instruments is a prerequisite for computer and robotic assisted interventions. Since additional hardware like tracking systems or the robot encoders are cumbersome and lack accuracy, surgical vision is evolving as promising techniques to detect and track the instruments using only the endoscopic images.
In our sub-challenge, we will focus on comparing different vision-based methods for instrument segmentation and tracking during laparoscopic interventions. We will address segmentation and tracking for rigid and articulated instruments in laparoscopic and robotic surgery.
Overall, the sub-challenge can be divided in two different tasks, participants are invited to submit results for at least one of the following tasks:
Segmentation: Can you segment the surgical instruments in an endoscopic image?
*Tracking: *Can you track the surgical instruments in an endoscopic image sequence?
![]()